
Rory Smith
The University of Northampton, Northampton UK
This paper was presented at The 8th Symposium on Lift & Escalator Technology (CIBSE Lifts Group, The University of Northampton and LEIA) (2018). This web version © Peters Research Ltd 2019.
Keywords: Lifts, robots, traffic handling.
Abstract. Lifts are increasingly being called upon to transport robots between floors in multi-story buildings. The robots that are presently available place special demands on lifts and those demands affect traffic handling. The special demands are explained and the impact of those demands on waiting time and transit time are reviewed using simulation.
1 Introduction
There are two principal types of robots; Industrial Robots and Service Robots. Industrial robots are used for manufacturing [1]. A Service Robot is defined by the International Organization for Standardization (ISO) as a robot “that performs useful tasks for humans or equipment excluding industrial automation applications” [2].
Service Robots are further subdivided into three categories by the International Federation of Robotics (IFR) [3]:
- Professional service robots
- Service robots for domestic/household tasks
- Service robots for entertainment
Service robots for domestic/household tasks are such things as robotic carpet cleaners. Service robots for entertainment are essentially toys. Therefore, this paper addresses only professional service robots.
While there are many types of professional service robots, including some that milk cows and others that have military applications, there is a subset of professional service robots that will ride in lifts with humans.
There are four building types where professional service robots are being applied in increasing numbers. These building types are hotels, office buildings, residential buildings, and hospitals.
In hotels, service robots are being used for room service deliveries and for the delivery and movement of housekeeping carts.
In office, buildings robots are delivering packages and mail from sources outside the building as well as interoffice correspondence.
The growth of e-commerce has caused an increase of package deliveries to multi-story residential buildings. Robots are being used to make the final delivery from the lobby to the residential unit.
Hospitals have used pneumatic tube systems for delivery of medicines and the transport of medical records. Pneumatic tube manufacturers are now offering robots as an alternative to tubes [4].
2 Robot characteristics that affect lifts
2.1 Mass & Size
There are two basic types of professional service robots that are manufactured by several manufacturers that need to use lifts to be effective. One type is a high mass vehicle that is referred to as a tug by one manufacturer [5]. The other type of robot is a low mass unit used for room service [6].
The tug type of robot has a payload of 453 kg. The tug and its lead acid batteries also have significant mass. It is 1164 mm long and 570 mm wide. It has a turning envelope of 1270 mm. The turning envelope is a circle with a diameter of 1270 mm. The area of this envelop is 1.27 m².
The room service robot has a total mass, including payload, of 50 kg. This robot is cylindrical and its diameter is 500mm. The turning envelope is also 500 mm which makes the area of the envelope 0.2 m².
The room service robot is designed to ride in the lift with human passengers. The mass, size, and turning envelop of the tug type robot needs a much larger lift. Consideration should be given limiting the access of a tug type robot to service lifts.
2.2 Velocity
Both types of robots have velocities of 0.76 m/s. Humans walking to a lift can be assumed to have a walking speed of 1.0 m/s [7]. Walking speed is a component of loading time.
2.3 Kinetic energy
Kinetic Energy is defined by the following equation [8]:
 (1)
(1)
Where:
𝐾𝐸 represents Kinetic Energy
𝑚 represents mass
𝑣 represents velocity
The ASME A17.1 code has a kinetic energy limit and velocity limit for Dumbwaiters with Automatic Transfer Devices [9]. An automatic transfer device is defined as “a power-operate mechanism that automatically moves a load consisting of a cart, tote box, pallet, wheeled vehicle, box, or other similar object from and/or to the car”. The kinetic energy limit is 40 J and the velocity limit is 0.5 m/s during unloading. These limitations do not apply directly to robots riding with human passengers as passengers do not ride in dumbwaiters. However, they give some guidance in the lack of a robot specific standard.
In the case of a tug type robot with a total mass of 600 kg (453 kg payload and 147 kg estimated tug mass), the loading speed would need to be reduced 0.365 m/s during loading and unloading to comply with the 40 J limitation.
A room service robot operating at 0.76 m/s does not exceed the 40J limit. However, it does exceed the 0.5 m/s velocity maximum. Therefore, the maximum velocity during loading and unloading should be limited to 0.5 m/s.
Based on kinetic energy and velocity limits, the loading and unloading times for robots should be greater than the loading and unloading time for humans.
Data needs to be gathered by observing loading operations with robots operating at these speeds. In the absence of this data it would seem logical to add 1.2 seconds to both loading and unloading times when assessing the impact of robots on traffic handling performance. These increased times will increase waiting and transit times.
2.4 Personal Space
Personal Space, as it relates to lifts, defines the number of passengers that will ride in a lift at one time. CIBSE Guide D suggests that an adult male will occupy a space of 0.21 m² [7]. This is based on the male being a European or North American and does not include personal space.
Barney proposes that the design capacity of a lift should be based upon approximately 0.263 m² per person [10].
Personal space is space between humans. Robots are not humans. There is some research that indicates humans do not view robots as social entities (humans) [11]. The spatial distance that humans will require with robots is probably affected by the same factors that affect spatial distance between humans such as age and culture.
Research is needed in this area. However, in the absence of data, a starting point might be to add a buffer zone of 150 mm around a room service robot. For example, a cylindrical robot with a diameter of 500 mm would occupy, 0.5 m² (space diameter of 800 mm).
Personal space for tug type robots should be different because they will need large lifts due to their mass, physical dimensions, and turning envelopes. Tug robots will not be considered in the traffic section of this paper.
3 Traffic effects
Room service robots are being installed in an existing 4 Star hotel in California. A study of the impact of these robots on passenger traffic was conducted. The following are the building, lift system, and passenger characteristics used for this traffic study.
Building:
Floors: 25
Rooms: 510, Located on Levels 4 – 25
Dispatch Lobby: Level 1
Occupancy: 440 Guests based on 86% occupancy and 1 person per room.
Lift System:
Number of Cars: 4
Capacity: 1600 kg
Speed: 2.5 m/s
Dispatch Algorithm: Estimated Time of Arrival (ETA).
Door Type: Center Opening
Door width: 1066 mm.
Car Loading: 60% by Volume
Passengers:
Humans:
Loading Time: 1.2 s
Unloading Time: 1.2 s
Area: .26m²
Robots (room service type):
Loading Time: 2.4s
Unloading time: 2.4 s
Area: 0.5 m²
Traffic Template: Peters (CIBSE) Hotel
Figure 1 below graphically represents the Passenger Demand levels of the Peters (CIBSE) Hotel traffic when applied to the occupancy of the subject hotel.
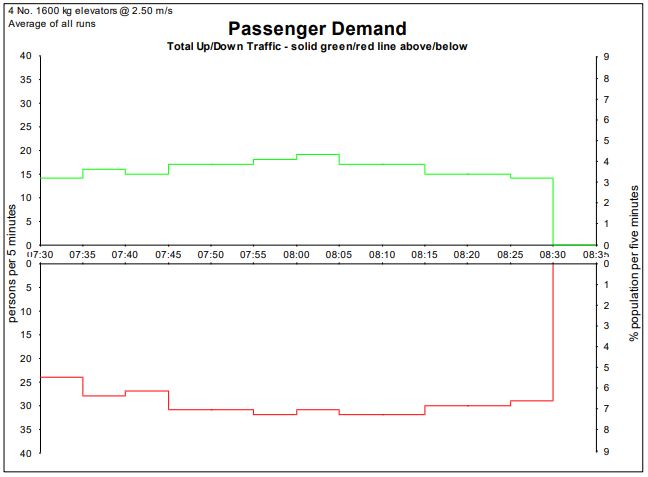
Figure 1 Passenger Demand, Peters (CIBSE) Hotel Template
Figures 2 and 3 show the results of traffic simulations using a Peters (CIBSE) Hotel Template with no robots installed. Figure 2 shows Waiting Times while Figure 3 shows Transit Times.
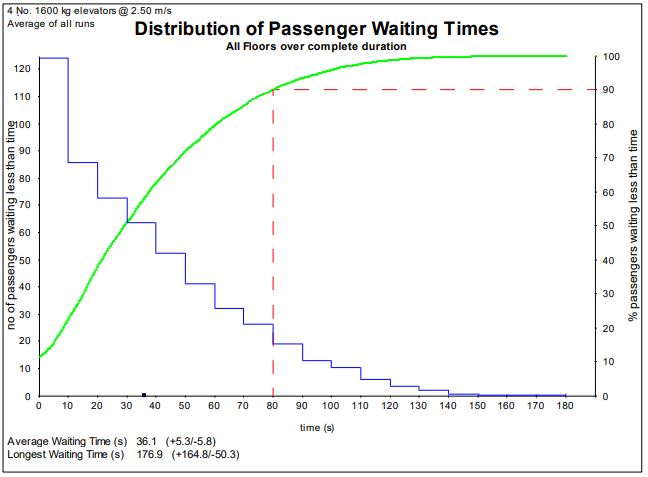
Figure 2 Waiting times without robots
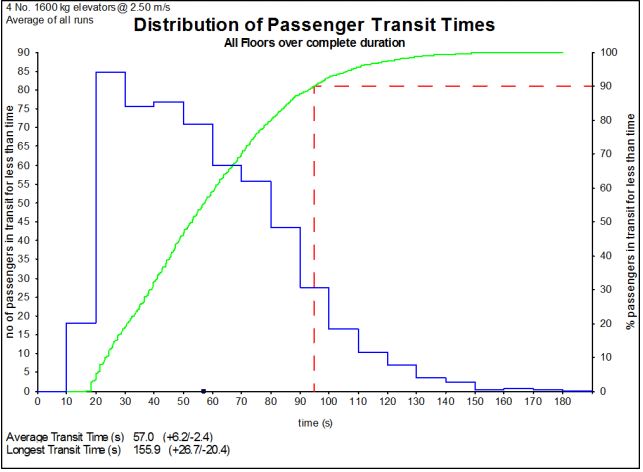
Figure 3 Transit times without robots
Figures 4 and 5 show the results of traffic simulations using a Peters (CIBSE) Hotel Template with one additional person making a room service delivery. The one person makes one delivery round trip every 5minutes. Figure 4 shows Waiting times while Figure 5 shows Transit Times.
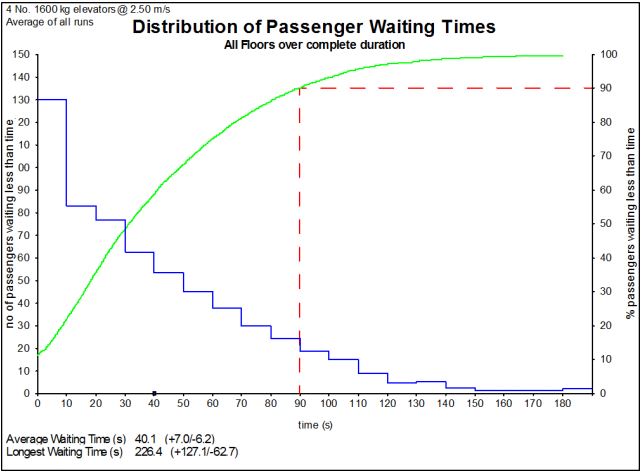
Figure 4 Waiting times with one additional human passenger
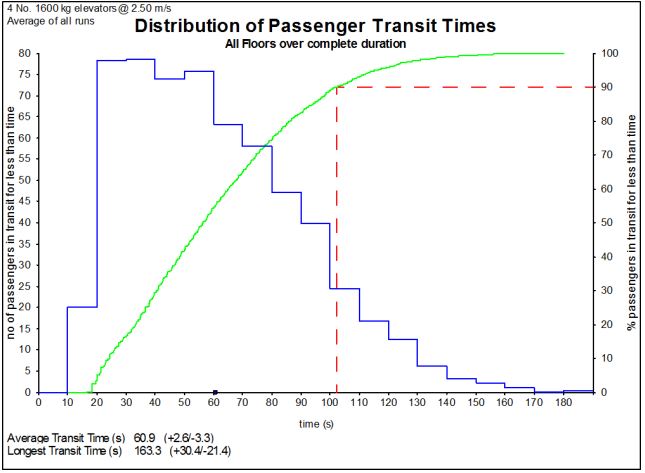
Figure 5 Transit times with one additional human passenger
Figures 6 and 7 show the results of traffic simulations using a Peters (CIBSE) Hotel template with one robot making a room service delivery. The one robot makes one delivery round trip every 5minutes. Figure 6 shows waiting times while Figure 7 shows transit times.
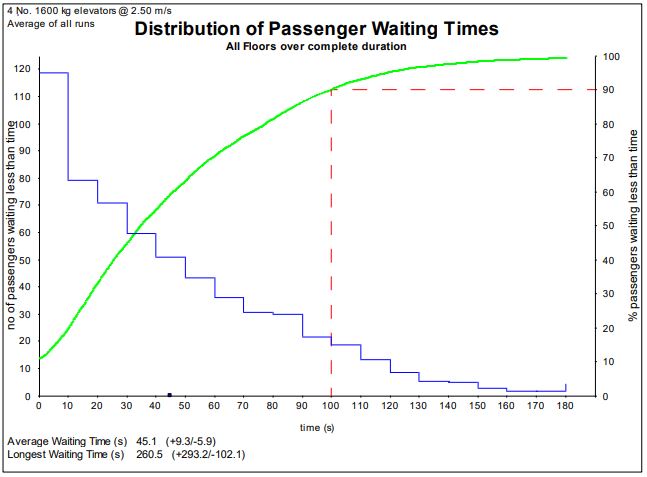
Figure 6 Waiting times with one robot
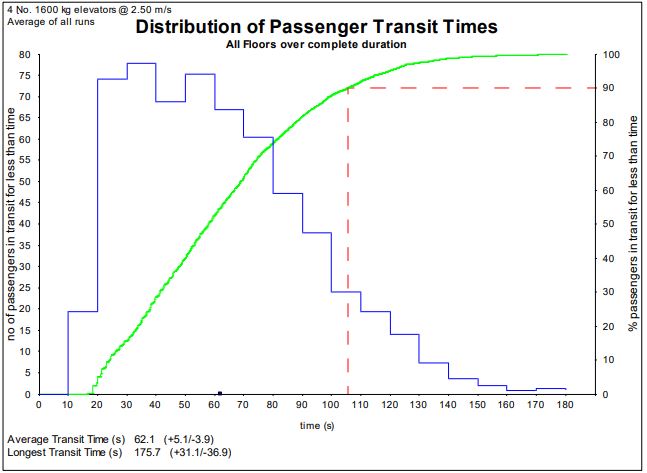
Figure 7 Transit times with one robot
Table 1 summarizes these results.
Table 1 Waiting Times, Transit Times and Times to Destination
| Waiting Time | Transit Time | Time to Destination | |
| No Robots | 36.1s | 57.0s | 93.1s |
| With 1 additional person | 40.1s | 60.9s | 101.0s |
| With 1 robot | 45.1s | 62.1s | 107.2s |
| Additional time for 1 robot compared to 1 person | 5.0s | 1.2s | 6.2s |
It should be noted that one robot will increase waiting time by 12.5% more than 1 person due to “personal space” and loading/unloading time.
4 Conclusions
Robots should be considered as a new class of passenger because they do not yet behave in the same manner as humans.
At present, their speed must be controlled during loading and unloading to either control kinetic energy or velocity. With continuing improvements in machine vision, robots may become better at avoiding collisions with people and property than humans and these restraints could be relaxed.
The physical shape of robots is not the same as humans and so the floor space they occupy is different from humans.
More research is needed to understand the human interaction with robots as passengers. We need to know how much personal separation humans need between themselves and robots.
The speed and personal space characteristics of robots have a negative effect on the traffic handling capacity of lift systems. If robots are planned for a new building, the proposed lift system should be designed acknowledging these effects. If robots are proposed for an existing building, a traffic study should be performed that demonstrates the impact of the robots.
The number of robot installations is growing. Lift traffic consultants need to understand the impact of robots on traffic so they can properly advise their clients.
REFERENCES
- Industrial Robot Available from: http:en.wikipedia.org/wiki/Industrial robot Last Accessed: 5 February, 2018.
- International Standard ISO 8373: 2012 Robots and robotic devices – Vocabulary
- Executive Summary World Robotics 2017 Service Robots Available from: https://ifr.org/downloads/press/Executive_Summary_WR_Service_Robots_2017_1.pdf Accessed 09 February, 2018
- Relay Autonomous Service Available from: https://www.swisslog.com/enus/healthcare/products/material-transport/autonomous-service-robot Accessed: 10 February, 2010
- TUG T3 Autonomous Mobile Robot Available from: www.aethon.com/tug Last Accessed: 06 February, 2018.
- Discussions with Phil Herget, Savioke Robotics, January, 2018.
- CIBSE, The Chartered Institution of Building Services Engineers Transportation Systems in Buildings, Guide D. CIBSE, Norwich (2015).
- Giancoli, D. (2012) Physics: Principles with Applications. Boston, Pearson
- ASME, American Society of Mechanical Engineers A17.1 (2013) Safety Code for Elevators and Escalators. ASME, New York
- Barney, G. (2003) Elevator Traffic Handbook. London: Spon Press.
- Walters, M. et al, (2005) Close Encounters: Spatial Distances between People and a Robot of Mechanistic Appearance. In: Proceedings of 2005 5th IEEE-RAS International Conference on Humanoid Robots.
BIOGRAPHICAL DETAILS
Rory Smith is Visiting Professor in Lift Technology at the University of Northampton. He has over 49 years of lift industry experience during which he held positions in research and development, manufacturing, installation, service, modernization, and sales. His areas of special interest are Robotics, Machine Learning, Traffic Analysis, dispatching algorithms, and ride quality. Numerous patents have been awarded for his work.