
Dr Richard D Peters, Peters Research Ltd
This paper was originally titled “Understanding the Benefits and Limitations of Destination Dispatch” but has been renamed to reflect the decision to refer to this technology as Destination Control.
Key Words: Simulation, dispatching, destination control, traffic analysis
This paper was presented at ELEVCON HELSINKI 2006, The International Congress on Vertical Transportation Technologies and first published in the IAEE book “Elevator Technology 16”, edited by A. Lustig. It is reproduced with permission from The International Assocication of Elevator Engineers. This web version © Peters Research Ltd 2009.
Abstract
In systems applying destination control, passengers register their destination at an input device at the elevator landing. When the allocated car arrives, it knows where the passenger is going, and thus there is no need for the passenger to register a car call. Proponents of destination control often make dramatic claims about the system’s performance. This paper examines the system’s benefits and limitations objectively though the application of simulation. Results are interpreted to explain why sometimes there is great benefit while at other times none. The question of whether or not the performance benefits of destination control can result in a requirement for fewer elevators is addressed.
1. Introduction
Most conventional elevator systems have up and down hall call buttons at each floor, except at the top and bottom floors where only one button is required. In destination based control systems (also known as call allocation), passengers enter their destination floor at the landing and the system responds by indicating which elevator to use.
Destination control is not a new concept, it was first conceived by an engineer named Port from Sydney in the early 1960’s [1]. At that time it was difficult to optimise the performance of destination control as the control logic of elevators was implemented in relays. Now that it is possible to control elevators with microprocessors, we can calculate more accurately the best elevator to answer a call. We have a far better opportunity to optimise elevator performance.
2. Optimisation process
In destination control, in theory we know about every passenger currently using the system as everyone is asked to register their call individually.
Figure 1 shows how a proprietary destination system by ThyssenKrupp [2] calculates which elevator to allocate to a passenger named Fred who is currently at the 7th floor, and wants to travel to the 2nd floor. In this instance the dispatcher is set to optimise with respect to time to destination, i.e. its only concern is to minimize the total time to destination of all the passengers; other optimization functions are possible which could focus on other issues, such as the relative importance of waiting time versus transit time, and the importance of reducing long waits or saving energy [3].
Figure 1 Example allocation with destination control
If Fred is allocated to the car 1, then he will wait 15 seconds for the car to arrive, plus 10 seconds as Anna has to be dropped of at level 8 first. It will take a further 25 seconds for Fred to reach his destination floor, level 2. Fred’s Estimated Time to Destination (ETD) is 15 plus 10 plus 25, which is 50 seconds. Anna is not delayed at all by Fred’s use of this car as she has alighted before he boards. So the System Degradation Factor (SDF) experienced by Anna is zero seconds. The total cost (ETD plus SDF) of this allocation would be 50 seconds.
If Fred is allocated to car 2, then he will wait 10 seconds until he can board. It will take another 25 seconds for Fred to get to level 2, but he also has to wait an additional 10 seconds as Simon needs to get out at level 6. So, if allocated to car 2, Fred’s ETD would be 45 seconds. Simon would be delayed by Fred using car 2; the system degradation factor is 10 seconds. Add the EDT and SDF to get a total cost for this allocation of 55 seconds.
If Fred is allocated to car 3, then he only waits 5 seconds until he can board the car. It then takes another 25 seconds for him to reach his destination. His ETD is 30 seconds. There is a group of 8 passengers already in the car, who are each delayed twice by Fred, once to pick him up and once to drop him off. At 10 seconds per passenger for each stop, this makes a SDF of 160 seconds. So, the total cost of this allocation is 190 seconds.
In this instance, car 1 has the lowest total cost and so is chosen to pick up Fred.
3. Handling capacity
To compare the handling capacity of conventional and destination systems we can run a simulation using Elevate [4]. Every 5 minutes we are going to increase the number of people using the elevators, until the system is completely overloaded, or “saturated”. This is represented graphically in Figure 2. In this instance we are considering up peak traffic only. In other words, all passengers are assumed to arrive at the main terminal floor and travel up the building. The number of elevators, size and speed is not important for this exercise; we just want an indication of the difference between the two systems when only the dispatching is changed.
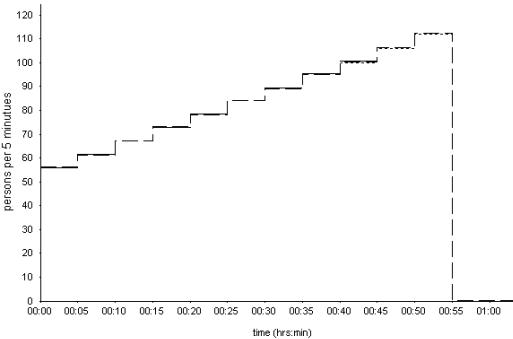
Figure 2 Elevate plot of increasing traffic (step profile) for up peak
A wide range of performance parameters could be considered, but in this instance we will look simply at waiting time, time to destination and queue lengths.
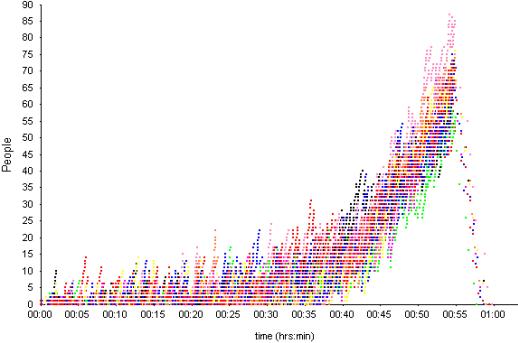
Figure 3 Up peak simulation results for conventional two-button system: queue lengths
First consider the conventional two-button system, results for which are given in Figures 3 and 4. It is saturating at around 0:40 when the intensity of the traffic reaches 95 persons per 5 minutes. At this point waiting times become intolerably high and the lobby queues start rising rapidly.
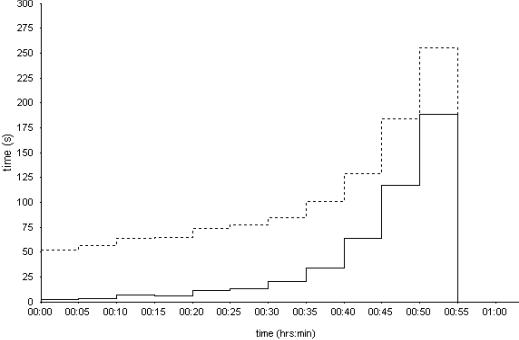
Figure 4 Up peak simulation results for conventional two-button system: waiting time (solid line) and time to destination (dotted line)
Results for destination control are shown in Figures 5 and 6. This system is still working comfortably at over 110 persons per 5 minutes.
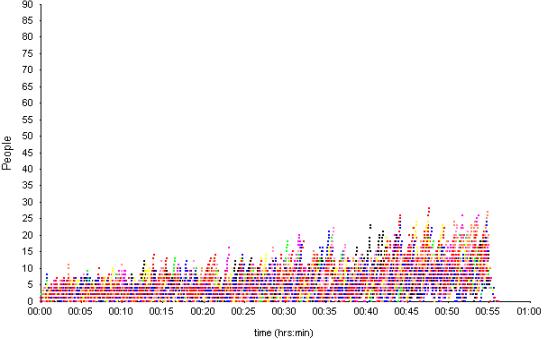
Figure 5 Up peak simulation results for destination control system: queue lengths
Note that if there were in fact only 80 persons per 5 minutes in the building, both systems would be fine. Destination control just gives us the facility to operate at a higher intensity of up peak traffic, if it is needed.
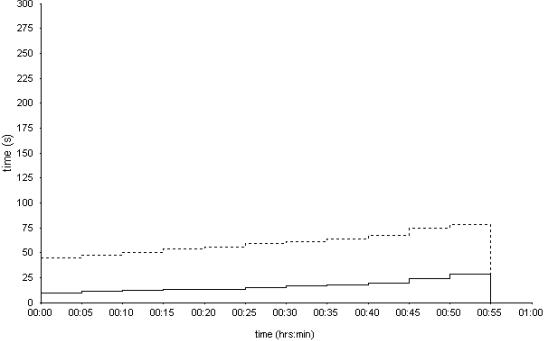
Figure 6 Up peak simulation results for destination control system: waiting time (solid line) and time to destination (dotted line)
4. Why it works
So, why does destination dispatch work? In Figure 7 we have a group of people who want to travel up the building. About half of them travel in each of the two available cars. Often the cars stop at the same floors.
Figure 7 Two-button systems in up peak
In a system using destination control, the optimisation process will result in passengers traveling to the same floors being grouped together. As shown in Figure 8, the elevators are making fewer stops, so their round trip is faster. This means they can move more people, in other words they have a greater “handling capacity”.
Figure 8 Destination control in up peak
In destination control, the passenger will sometimes wait longer to be picked up as they will not necessarily be allocated the next car to arrive. However, because the elevator makes fewer stops, the overall time to destination is normally less than a conventional system. An overloaded conventional system can often be brought out of saturation by installing destination control as we have more handling capacity available.
5. Less elevators required?
So, if a system with destination control has greater handling capacity, does that mean that we can use fewer elevators? Up peak performance would seem to suggest this. However we must also consider lunchtime. Surveys show [5][6] that in modern office buildings, the intensity of traffic during lunchtime is equal to or busier than the morning up peak. How does destination control perform at lunchtime? Figure 9 illustrates how destination control has less opportunities to group passengers at lunchtime that it does in the morning.
Figure 9 Destination control at lunchtime
A good destination control system will benefit from some grouping at lunchtime. A good two-button system will benefit from being able to re-evaluate earlier allocations as new people arrive. (When destination control makes an allocation, the allocation is reported immediately to the passenger and the system is committed.) It is questionable whether or not either system has a major advantage at lunchtime.
A two-button elevator system has greater handling capacity with traffic profiles characteristic of lunchtime than it does during the morning up peak. During a heavy up peak, passengers fill the car at the entrance level, and then travel up the building. Only one carload is transported per round trip. At lunch time the car capacity can be utilized in both the up and down direction. So, we can transport more people per round trip. The round trip takes longer, but still the overall handling capacity will be more.
Again this can be demonstrated in simulation using a step profile. In this instance we have a mix of up, down and interfloor traffic, increasing every 5 minutes, as indicated in Figure 10. The intensity or volume of traffic is the same as the previous up peak simulation.
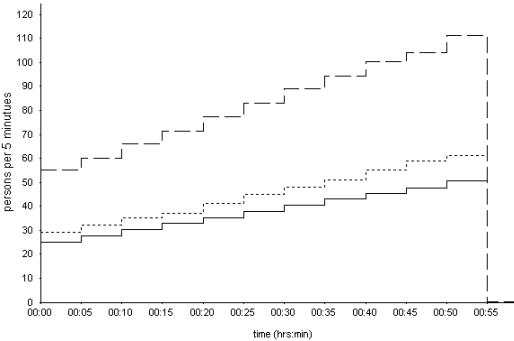
Figure 10 Elevate plot of increasing traffic (step profile) for lunch peak: incoming (solid line), interfloor (dotted line), and outgoing (dashed line)
Notice from the results given in Figures 11 to 14 that the performance of the two systems is similar, and that neither is saturating in this case.
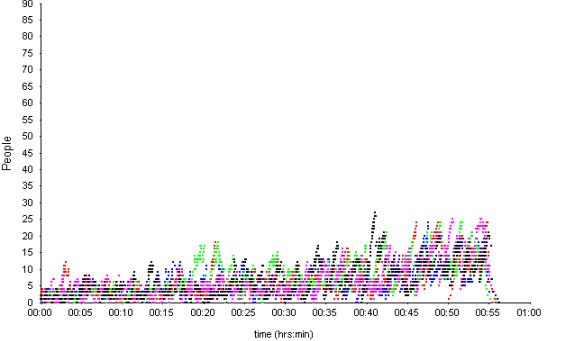
Figure 11 Lunch peak simulation results for conventional two-button system: queue lengths (total for all floors)
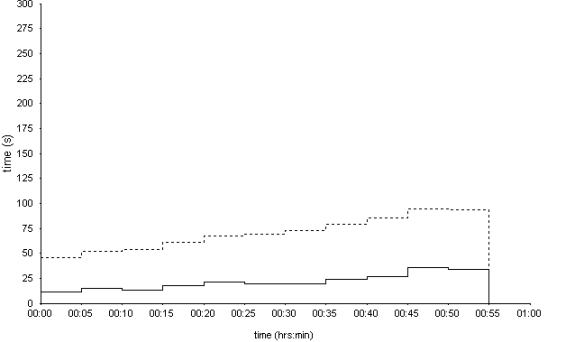
Figure 12 Lunch peak simulation results for conventional two-button system: waiting time (solid line) and time to destination (dotted line)
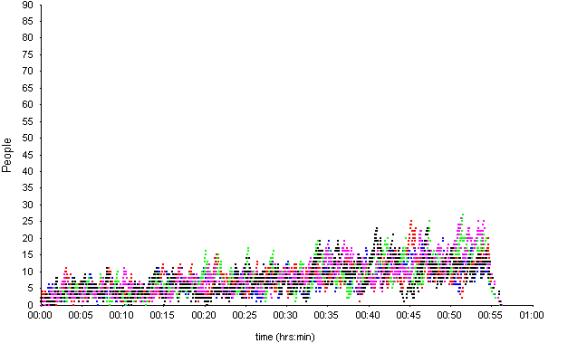
Figure 13 Lunch peak simulation results for destination control system: queue lengths
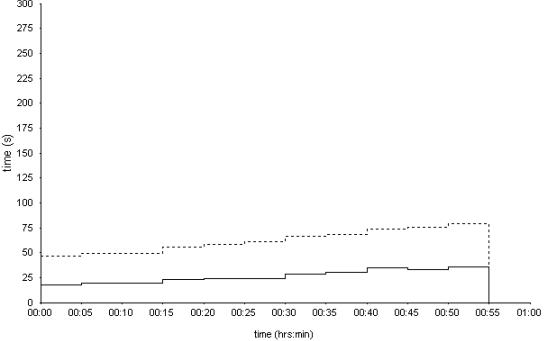
Figure 14 Lunch peak simulation results for destination control system: waiting time (solid line) and time to destination (dotted line)
Experience shows that the performance enhancement due to destination control is of less benefit during the lunch period. So, can we select fewer elevators solely on the basis that we are using destination control? Firstly, this decision can only be taken after analysis of the lunchtime performance. Secondly, with fewer elevators, the system may not saturate, but passengers are likely to endure longer waiting times than if a conventional system had been installed, and the full amount of elevators had been installed. This may or may not be acceptable.
6. Other considerations
The results presented in this paper are based on exactly the same simulation parameters; only the dispatcher has been changed. However, observation does confirm the assumption of some designers that passenger transfer times are faster with destination control. This is because (i) passengers tend to position themselves in front of the allocated car before it arrives, and (ii) passengers are grouped, so there are less instances of a full car stopping and single passengers having to make their way through a crowded car to the doors.
Grouping people with common origin and/or destination floors results in people not always taking the next car to depart from their floor. Once they get into the car, there are generally less stops, so any extra waiting time is made up for in transit time savings. If the lowest possible waiting times is paramount, then people will generally be allocated to the next available car, and the handling capacity boost associated with grouping passengers together will be lost. Systems can be set up to put a higher priority on waiting time when the traffic is at a level where the boost in handling capacity is not needed. But if the boost is needed, passengers need to accept the premise that better service is provided by a shorter total time to destination, rather than a shorter waiting time. The designer should consider the relative importance of waiting versus transit time.
When not all elevators serve all the floors, placing an up or down call in a two-button system does not give the dispatcher enough information. It may send an elevator that does not serve the floor to which the passenger wants to travel. There are solutions to this, for example in some installations additional call buttons are installed. But this can cause more difficulties, as some passengers will push both buttons, resulting in wasted stops by the elevators. In almost all situations, the best solution is for all elevators to serve all floors in any one group of elevators. But if this is unacceptable or not possible, then the best solution is to use destination control.
In spite of having all the information about all the passengers (in theory), in some circumstances it is possible for an intelligent two-button dispatching algorithm to match, or even marginally improve upon destination control. This is because (i) the conventional system can change its mind about the allocation of existing calls in the system when new calls are registered (ii) in some instances the destination information is predictable, for example, at the end of the day most people registering a down call are traveling to the ground floor.
Having to enter your destination at the lobby only is relatively simple. In an office building, where the people are using the system every day, it takes only a few days for people to adapt. However, in buildings with transient population, for example hotels, there is more likely to be confusion. As the system becomes widely adopted, and the general population becomes more technologically proficient, this issue may or may not resolve.
Security systems and special service functions can integrate well with destination control. For example, to call a specific car for goods use, or to go to a secure floor, the system may prompt for a pin number.
Up peak boosters take advantage of the main benefit of destination control by installing destination input devices on main entry floors on all floors. During up peak traffic, the system has as much information about the main component of traffic as the equivalent full destination system. So it can achieve a similar grouping and boost in up peak performance. It is during the up peak where destination provides greatest benefit, so for modernizations, or where destination input devices are prohibitively expensive, the boost option may provide a cost effective solution.
7. Conclusions
Simulation demonstrates that, in an under-elevated building, destination control improves up peak performance dramatically; this can also be seen in real buildings. However, this is not a good reason to under-elevate a building! If departing from conventional two-button system selection criteria for numbers, sizes and speeds of elevators, the designer should analyse performance during all peaks, not just the up peak. Improvements in up peak performance are unlikely to be repeated at other peak times.
In new buildings, destination control will help (i) if there is no option but to use fewer elevators than a conventional design suggests; (ii) as an “insurance” against the building population growing beyond the design population; (iii) to reduce the chance of the system overloading if a car is out of use for goods use, maintenance or breakdown. For these reasons, destination control should be seriously considered for all major office buildings, even if an up peak boost is unlikely to be needed in normal operation.
In buildings with transient populations such as hotels or public buildings, the designer should be more cautious, as unfamiliarity with the system may cause confusion. As destination control becomes more widely adopted, this may no longer be a problem. In some scenarios, for example where not all cars serve all floors, destination control is unquestionably the best solution.
ACKNOWLEDGMENTS
The author would like to thank Mr Rory Smith, Dr Bruce Powell and Dr Gina Barney for discussions and correspondence which have led to a better understanding of this dispatching technology.
REFERENCES
- Port, L.W. (1961), Elevator System Commonwealth of Australia Patent Specification, Application Number 1421/61, 14 February 1961.
- Smith R, Peters R ETD Algorithm with Destination Dispatch and Booster Options Elevator Technology 12, Proceedings of ELEVCON 2002 (The International Association of Elevator Engineers) (2002)
- Smith R, Peters RD Enhancements to the ETD dispatching Elevator Technology 14, Proceedings of ELEVCON 2004 (The International Association of Elevator Engineers) (2004)
- Elevate traffic analysis & simulation software, www.peters-research.com
- Peters R D, Mehta P, Haddon J Lift Passenger Traffic Patterns: Applications, Current Knowledge, and Measurement Elevator Technology 7, Proceedings of ELEVCON’96 (The International Association of Elevator Engineers) (1996) (also presented at IAEE London Lift Seminar May 1997)
- Siikonen M-L On Traffic Planning Methodology Elevator Technology 10, Proceedings of ELEVCON 2000 (The International Association of Elevator Engineers) (2000)